一、相机定位技巧
车牌识别相机在安装时要考虑位置的选择,一般要求镜头正对车辆来向的位置,以获取最佳抓拍识别效果,主要考虑因素如下:
路口形状
常见路口形状分为:I型、L型、T型
I型路口一般指路口很直,这种情况识别机安装在道路两侧均可,可根据实际情况,选取接线更方便的一侧安装。
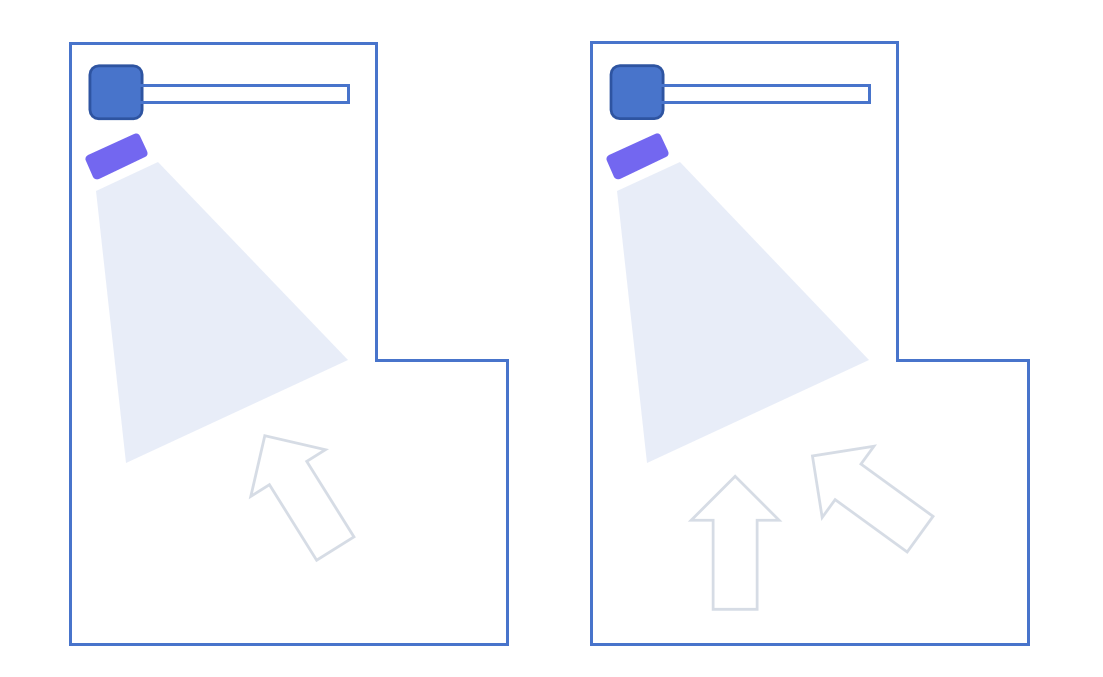
L型路口车辆需要转90°角后识别,应安装在正对转角的一侧。这种定位方法也适用于正向也有来车的路口,可以同时兼顾正面和一个侧面的来车。
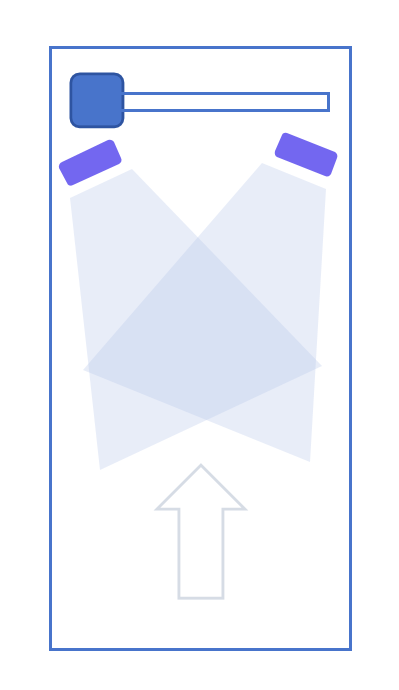
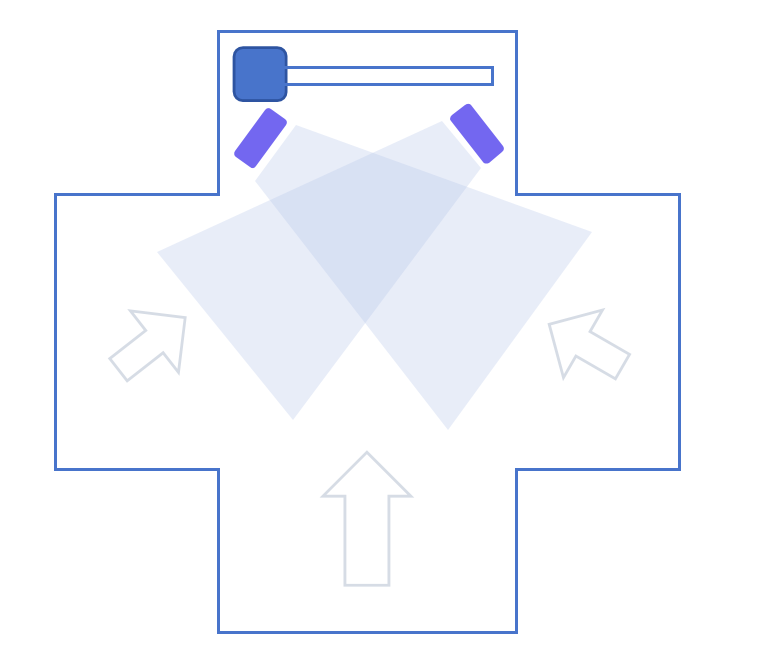
T型路口,两侧都有车辆转90°角后识别,由于普通相机的可视角度优先,无法同时兼顾180°角的范围,因此需要在两侧各安装一台,并配置主辅机联动。确保两侧和正向来车均可以有很好的识别角度。
车道长度
车辆在抓拍时需要尽量做到:车头正对相机镜头。
正常情况下,面相车辆驶来的方向,车牌识别相机应安装在闸机的前面。
有些道口由于离停车位或转角太近,纵深太小,导致车辆还没有完全正对相机,就已经进入了识别区,这种情况可以考虑将车牌识别相机安装在闸机后面,已获得更长的车道纵深。
使用此方法应注意,避免闸机遮挡车牌识别显示屏,如遇此问题,可将车牌识别基础适当垫高。
流量流速
车牌识别相机一般尽量靠近闸机安装,下面两种情况可适当增大距离,提升整体运行效率:
(1)车道又长又直,且自动开闸:例如入口、连接通道、不收费车场的出口。
(2)闸机主板带有开闸计数功能。
对于流量大,通行速度慢的车道,除了相机要紧贴闸机以外,还需讲镜头角度尽量压低,进一步缩短识别区与闸杆之间的距离。
这种方式会牺牲通行效率,保障一车一杆,避免前车把后车的识别起杆带下来,导致后车无法出场。
二、镜头角度调整
找到最佳识别位置:将车辆驶入车道内,当司机认为此时应该抬杆的时候,立即停车,当前车头所处的位置即为最佳识别位置。
调节镜头角度:旋转镜头模组支架或万向节,使屏幕显示的相机视频画面中的参考车辆的车牌,位于屏幕的中下部,并在画面中保持水平。

没有参考车辆的情况下,可大概估计司机和车头的相对位置,在车头位置0.5米高处,放置一个长方形物品,作为车牌位置参考。
三、虚拟线圈优化
识别区域应避开画面内其他静止车辆的车牌,或岗亭、墙壁、绿化带等完全不可能出现车牌的位置,可以避免干扰,增强识别效果。
虚拟线圈应在识别区域内部,面积小于识别区域,且虚拟线圈的上边缘应与识别区域的上边缘留出一定的距离,确保触发时车牌完全在识别区域内。

四、抓拍方向控制
单向通行的车道,可以将车辆运动方向设置为:双向,当车辆经过触发区没有识别成功时,后退经过识别区可再次识别,加快车辆识别通行速度。
同进同出的车道,车辆运动方向必须设置为:从上至下,否则会导致车辆入场成功后,在出口